|
I am a PhD student at MIT CSAIL, where I work on robotics and machine learning. |
|
My research interest lies in finding a scalable path to robotics foundation models. I believe this will require solving cross-embodiment learning—especially transferring knowledge from human videos —as well as developing reinforcement learning methods that scale to large, real-world robotics datasets. |

|
Richard Li, Aditya Prakash, Andrew Wen, Saurabh Gupta, Yilun Du, Pulkit Agrawal Data-Centric Robotics Workshop @ RSS 2026 project page / arXiv Hand pose quality and embodiment-specific network specialization are key to enabling transfer from everyday videos to robots. |
|
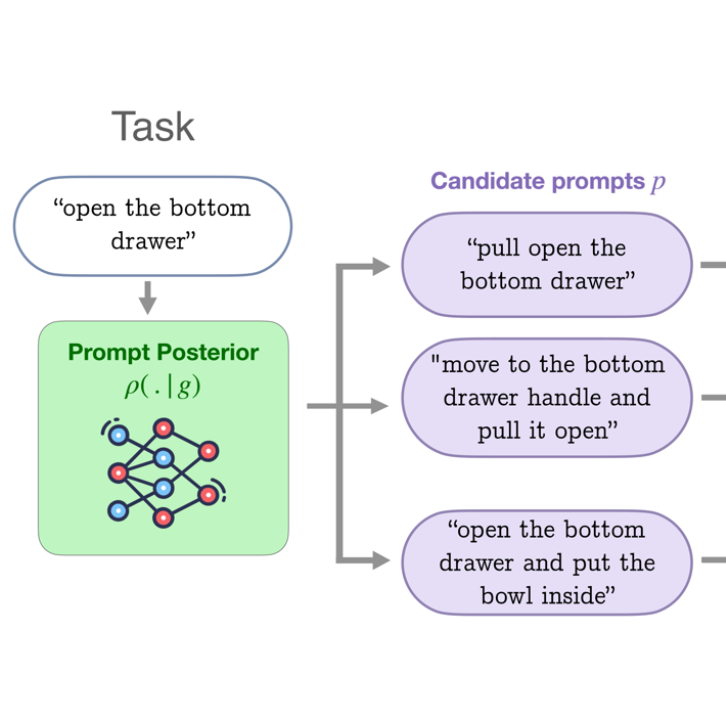
Sunshine Jiang, John Marangola, David Zhang, Raghuram Kowdeed, Ruiyang Luo, Nitish Dashora, Richard Li, Pulkit Agrawal, Zhang-Wei Hong ICRA 2026 Workshop on VLA Pipelines for Real Robots project page / paper Exploring in language space: a VLM iteratively refines task prompts from rollout observations, enabling VLA policies to bootstrap reinforcement learning from zero-reward starts. |
|
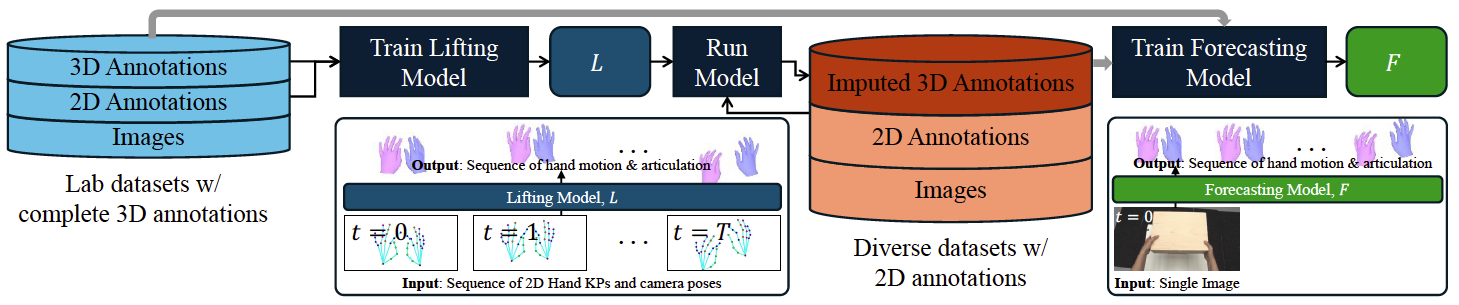
Aditya Prakash, Richard Li, David Forsyth, Saurabh Gupta 2025 project page / code Forecasting bimanual 3D hand motion and articulation from a single image using a diffusion-based lifting and forecasting pipeline. |
|
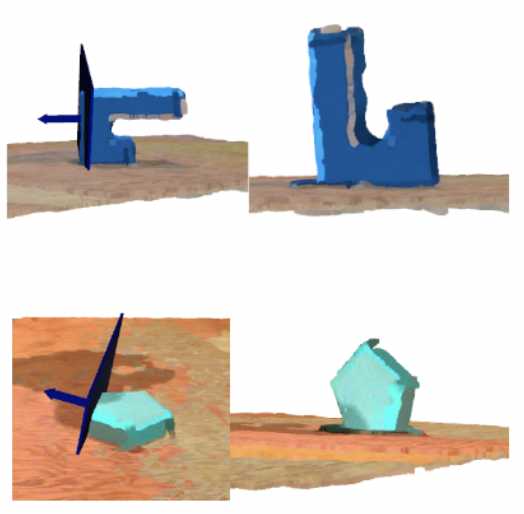
Richard Li, Carlos Esteves, Ameesh Makadia, Pulkit Agrawal ICRA 2022 project page / video / code Predicting contact points with a CVAE and plane segmentation improves object generalization and handles multimodality. |
|
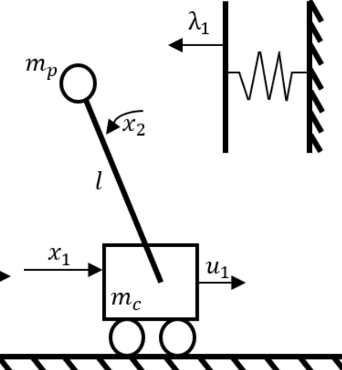
Richard Li, Timur Garipov 2022 paper / video Synthesizing Lyapunov controllers through contact with alternating optimization. |

|
Richard Li, Annan Zhang 2021 paper Vision-based fingertip pose estimation with internal camera and CNN pose estimator. |
|
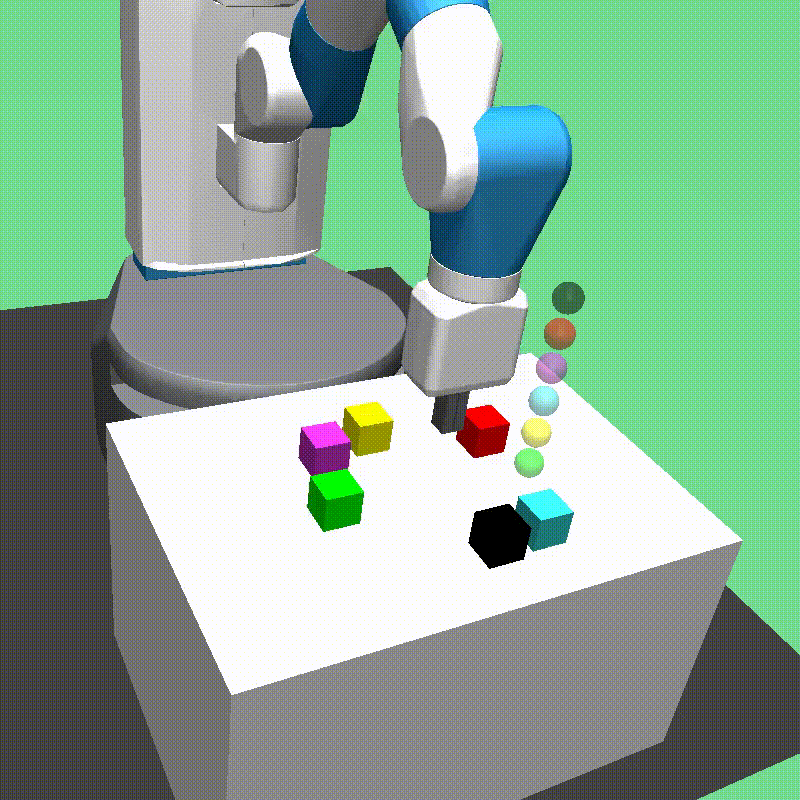
Richard Li, Allan Jabri, Trevor Darrell, Pulkit Agrawal ICRA 2020, ICML 2020: Bridge Between Perception and Reasoning Workshop project page / video / code Multi-object, long-horizon manipulation can be autonomously learned using a curriculum and graph neural network architecture. |